Media Summary: Master thesis project at KTH (Royal institute of technology), Stockholm, for the Maritime robotics laboratory. Paper available at: arxiv.org/abs/2404.07880 Abstract: Multi agent target tracking scenario framework
Multi Agent Autonomous Target Tracking Using Distance Based Formations - Detailed Analysis & Overview
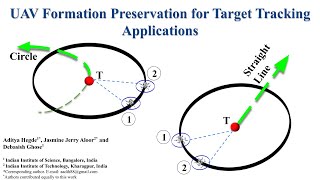
Master thesis project at KTH (Royal institute of technology), Stockholm, for the Maritime robotics laboratory. Paper available at: arxiv.org/abs/2404.07880 Abstract: Multi agent target tracking scenario framework The video shows an accelerated simulation that reproduces a scenario of underwater acoustic source Autonomous Target Tracking by Multiple UAVs T-ASE: Active Target Tracking with Self-Triggered Communications in Multi-Robot Teams
Status: Accepted for publication in IEEE Robotics and Automation Letters (RA-L) □Full title: DMVC- Multi agent target tracking scenario framework--Simulation only This is the presentation video for the paper ”