Media Summary: Multi-robot exploration with NAv2 (TFG Irene Bandera) Authors: Aalok Patwardhan, Andrew J. Davison Dyson Abstract: we present an innovative approach to
Master Thesis Multi Robot Collaborative Autonomous Exploration - Detailed Analysis & Overview
Multi-robot exploration with NAv2 (TFG Irene Bandera) Authors: Aalok Patwardhan, Andrew J. Davison Dyson Abstract: we present an innovative approach to This method enables a team of heterogeneous This video showcases a video demonstration of a This paper presents a deployment-based platform for task assignment problem in a
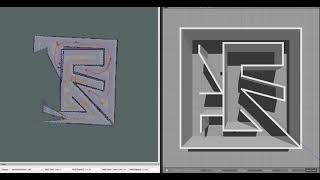
Video for the RAL submission. Title:Meeting-Merging-Mission: A Reference: Micah Corah. Sensor Planning for Large Numbers of Exploring navigation capabilities with Nav2 on ROS2 and Turtlebot3 at the UJI Multi-Robots Lab Deep Reinforcement Learning for Decentralized Multi-Robot Exploration with Macro Actions IEEE/RSJ International Conference on Intelligent