Media Summary: This video demonstrates how to use video data to measure the position of a drone without GNSS. Presentation for the IEEE International Conference on Robotics and Automation (ICRA) 2022 Article Title: Constrained ... In this video, Kyle from ModalAI explains what
Visual Inertial Localization - Detailed Analysis & Overview
This video demonstrates how to use video data to measure the position of a drone without GNSS. Presentation for the IEEE International Conference on Robotics and Automation (ICRA) 2022 Article Title: Constrained ... In this video, Kyle from ModalAI explains what In this letter, we develop a low-cost stereo This talk was presented at the ICRA21 Workshop on Demonstration video of the same-titled paper for IWCIM23 satellite conference of ICASSP.
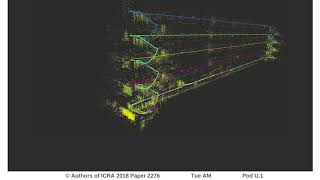
We have proposed in IROS-11 a new approach to fusing information from vision and A Fiducial-Based, Underwater Stereo Visual Inertial Localization Method with Refraction Correction Sachini Herath, David Caruso, Chen Liu, Yufan Chen, and Yasutaka Furukawa "Neural Accepted to IROS 2021. We present a consistent and distributed state estimator for multi-robot cooperative Accurately estimating a robot's pose relative to a global scene model and precisely tracking the pose in real-time is a fundamental ... ICRA 2018 Spotlight Video Interactive Session Tue AM Pod U.1 Authors: Schneider, Thomas; Dymczyk, Marcin Tomasz; Fehr, ...
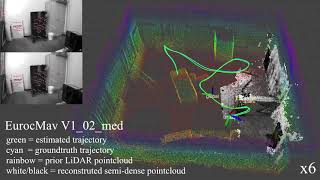
Accepted to IROS 2021. Abstract: In this paper we present a consistent and distributed state estimator for multi-robot cooperative ... Flying robots require a combination of accuracy and low latency in their state estimation in order to achieve stable and robust flight ...














![[ICCV25] Egocentric Action-aware Inertial Localization in Point Clouds with Vision-Language Guidance](https://i.ytimg.com/vi/KZJrFzUnq_Q/mqdefault.jpg)

