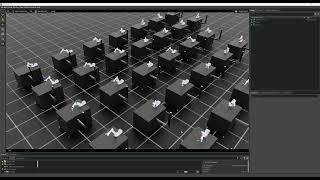
Media Summary: In those video series, we are going to talk about Join NVIDIA GTC and learn more about advanced n this experiment, I deployed a trained policy from NVIDIA
Isaac Lab Reinforcement Learning Reach Task Ar4 Robot Arm - Detailed Analysis & Overview
In those video series, we are going to talk about Join NVIDIA GTC and learn more about advanced n this experiment, I deployed a trained policy from NVIDIA Contact Rich Manipulation in Isaac Lab using RL