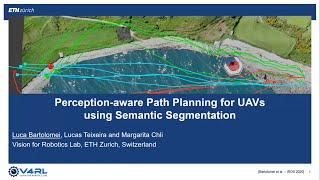
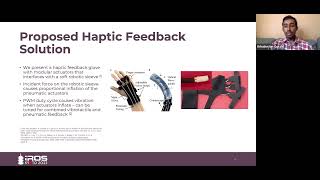
Media Summary: Passivity Filter for Variable Impedance Control by Maciej Bednarczyk, Hassan Omran and Bernard Bayle. Abstract - In this work, we present a perception-aware path-planning pipeline for Unmanned Aerial Vehicles (UAVs) for navigation ... Gerald A., Batliwala R., Ye J., Hsu P., Aihara H., and Russo S., "A Soft Robotic Haptic Feedback Glove for Colonoscopy ...
Iros 2020 Presentation Video - Detailed Analysis & Overview
Passivity Filter for Variable Impedance Control by Maciej Bednarczyk, Hassan Omran and Bernard Bayle. Abstract - In this work, we present a perception-aware path-planning pipeline for Unmanned Aerial Vehicles (UAVs) for navigation ... Gerald A., Batliwala R., Ye J., Hsu P., Aihara H., and Russo S., "A Soft Robotic Haptic Feedback Glove for Colonoscopy ... Abstract - In this work, we present a system architecture to enable autonomous navigation of multiple agents across user-selected ... Motivated by the astonishing capabilities of natural intelligent agents and inspired by theories from psychology, this paper ... Peg-in-Hole Using 3D Workpiece Reconstruction and CNN-based Hole Detection -