Media Summary: In this video lecture, we describe some of our on-going work on Talk about a simple method of dealing with constraints on hand Full paper title: Sampling of Pareto-Optimal Trajectories using Progressive Objective Evaluation in Multi-Objective
Iros 2020 Motion Planning Tutorial - Detailed Analysis & Overview
In this video lecture, we describe some of our on-going work on Talk about a simple method of dealing with constraints on hand Full paper title: Sampling of Pareto-Optimal Trajectories using Progressive Objective Evaluation in Multi-Objective We investigate the problem of multi-robot coordinated Understanding Dynamic scenes using GCNs(IROS 2020) Hello everyone my name is jose rochelle postdoc at ut austin and today i'm gonna present our work
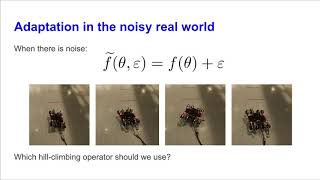
Hi today i'm going to talk about kinodnamic This is the 15 minute video for the paper "Rapidly Adaptable Legged Robots via Evolutionary Meta-Learning" featured at Research presented at International Conference on Intelligent Robots and Systems, Las Vegas,








![IROS20 [presentation]: Kinodynamic Motion Planning for Multi-Legged Robot](https://i.ytimg.com/vi/8D_dIgH_T50/mqdefault.jpg)


![[IROS 2020] Graph Neural Networks for Decentralized Multi-Robot Path Planning](https://i.ytimg.com/vi/Ph9vjMNe6go/mqdefault.jpg)