Media Summary: Visit the project webpage: Source Code available: ... Visit the project webpage: Source Code Available: ... It seems to work...but.... Matrix-vision, Blue-fox camera is used. If you are interested in this, search
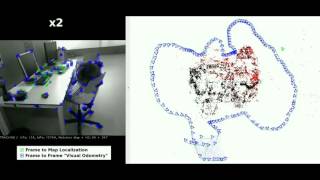
Orb Slam In A Challenging Indoor Sequence - Detailed Analysis & Overview
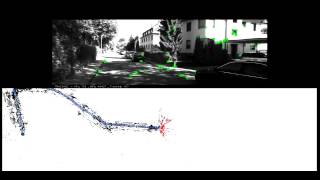
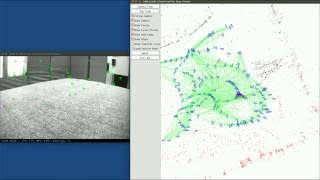
Visit the project webpage: Source Code available: ... Visit the project webpage: Source Code Available: ... It seems to work...but.... Matrix-vision, Blue-fox camera is used. If you are interested in this, search This is a demonstration of ORB_SLAM3 performing visual A Parrot AR Drone 2.0 is used with a maximum flight time of 12 min in ICRA 2018 Spotlight Video Interactive Session Tue AM Pod U.7 Authors: Mur-Artal, Raul; Tardos, Juan D. Title:
Raúl Mur-Artal and Juan D. Tardós. "Visual-Inertial Monocular Code & Info: Authors: Raúl Mur-Artal, J. M . M. Montiel and Juan D. Tardós University of ...