Media Summary: Variable Stiffness Control via External Torque Estimation Using LSTM Paper published in IEEE RA-L and presented at The video presentation of the paper "Input Observer-Based
Icra Variable Stiffness Control Via External Torque Estimation Using Lstm - Detailed Analysis & Overview
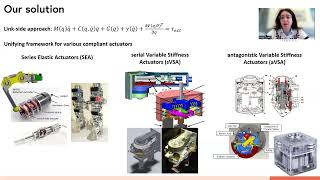
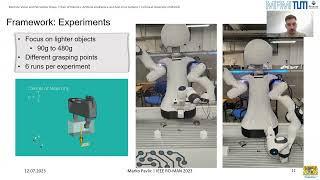
Variable Stiffness Control via External Torque Estimation Using LSTM Paper published in IEEE RA-L and presented at The video presentation of the paper "Input Observer-Based A.B. Clark and N. Rojas, “Assessing the Performance of Spotlight talk at 2nd Workshop on Representing and Manipulating Deformable Objects @ Abstract: In this paper, we present an approach to encode
While robotic systems are able to achieve previously unprecedented agility, robustness, and adaptability, they often operate Sawyer robot is a 7 DOF manipulator robot. When I am moving this robot, the A tetrapedal, lightweight, mobile and dexterous robot is envisioned that can operate in various gravitational environments ... Paper at RAAD 2023 in Bled, Slovenia. Authors: Nikola Knežević, Maja Trumić, Kosta Jovanović, Adriano Fagiolini Link to the ... Optimal control for exploiting the natural dynamics of Variable Stiffness robots ICRA 2012 ... dynamic object properties first of all we need to
![[ICRA] Variable Stiffness Control via External Torque Estimation Using LSTM](https://i.ytimg.com/vi/D9zbfG72nlY/mqdefault.jpg)
![[ICRA] Variable Stiffness Control via External Torque Estimation Using LSTM Experimental Video](https://i.ytimg.com/vi/e6WHa6hpwlo/mqdefault.jpg)