Media Summary: While robotic systems are able to achieve previously unprecedented agility, robustness, and adaptability, they often operate with ... ICRA 2018 Spotlight Video Interactive Session Thu AM Pod B.7 Authors: Chalvet, Vincent; Braun, David Title: Direct-drive motors (DDMs) have been increasingly used for robot actuation because they provide high-fidelity torque control, but ...
Algorithmic Design Of Variable Stiffness Mechanisms - Detailed Analysis & Overview
While robotic systems are able to achieve previously unprecedented agility, robustness, and adaptability, they often operate with ... ICRA 2018 Spotlight Video Interactive Session Thu AM Pod B.7 Authors: Chalvet, Vincent; Braun, David Title: Direct-drive motors (DDMs) have been increasingly used for robot actuation because they provide high-fidelity torque control, but ... Google Tech Talks August 15, 2007 ABSTRACT One of the challenges that the Internet raises is the necessity of 基於可變剛性致動器設計之機器夾爪by 台科大機械系吳健平. Matthew Shen presenting the TAROS 2020 paper: M. Shen, A.B. Clark, and N. Rojas, “A Scalable
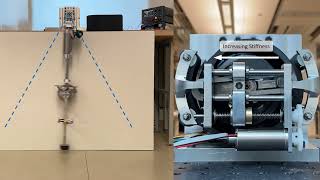
Optimal control for exploiting the natural dynamics of Variable Stiffness robots ICRA 2012 Compliant actuators are typically designed to possess a tunable positive In this video, we demonstrate a 3D printed This video shows the elbow exoskeleton developed at the Jožef Stefan Institute. It relies on a novel This video is prepared as a Multimedia Extension for IEEE Access. Paper: Nagamanikandan Govindan, Shashank Ramesh and ... MIT RES.18-009 Learn Differential Equations: Up Close with Gilbert Strang and Cleve Moler, Fall 2015 View the complete course: ...
Paper in Robotics & Automation Letters: Also appears in IROS 2018 Authors: ... VeritasiumContest I am posting this video in response to a contest announced by Veritasium challenging educators to explain a ...