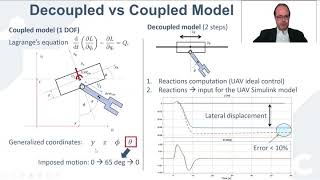
Media Summary: Paper: Tognon M, Yüksel B, Buondonno G, Franchi A. Paper: Yüksel B, Buondonno G, Franchi A. Differential Flatness and Decoupled dynamic model of an aerial manipulator
Dynamic Decentralized Control For Protocentric Aerial Manipulators - Detailed Analysis & Overview
Paper: Tognon M, Yüksel B, Buondonno G, Franchi A. Paper: Yüksel B, Buondonno G, Franchi A. Differential Flatness and Decoupled dynamic model of an aerial manipulator Accompanying video for our paper, "Coordinate Free Submitted to ICRA 2020 In this work, we develop a coordinate-free Paper: Petitti A, Franchi A, Di Paola D, Rizzo A.
Decentralized Nonlinear MPC for Robust Cooperative Manipulation by Heterog. Aerial-Ground Robots The video shows the evolution of two Unmanned Video attached to the paper: Gabriele Nava, Quentin Sablé, Marco Tognon, Daniele Pucci, Antonio Franchi. "Direct Force ... ICRA 2018 Spotlight Video Interactive Session Tue AM Pod F.1 Authors: Culbertson, Preston; Schwager, Mac Title: The recorded version of our conference talk at ICRA 2021, where our paper was a Finalist for "Best Paper in Unmanned IEEE ICRA 2021 Best Paper Award on Unmanned
This is the introduction video of the paper " Predictive Kinematic Coordinate Matthew Turpin, Nathan Michael, and Vijay Kumar's ICRA2012 Submission Video. This paper presents single-layer robust nonlinear controllers for the unmanned Aerial Drone Manipulator Control with Actin Status: accepted for publication in IEEE International Conference on Robotics and Automation (ICRA) 2023 * Category :









![[RAL2021] Aerial Manipulator Pushing a Movable Structure using a DOB-based Robust Controller](https://i.ytimg.com/vi/Kim9ulZ03Qc/mqdefault.jpg)
![[ICRA2025] Predictive Kinematic Coordinate Control for Aerial Manipulators](https://i.ytimg.com/vi/LTK-raB5JuY/mqdefault.jpg)





