Media Summary: The recorded version of our conference talk at ICRA 2021, where our paper was a Finalist for "Best Paper in Unmanned Status: IEEE International Conference on Robotics and Automation (ICRA) 2020 accepted. Video attached to the paper: Gabriele Nava, Quentin Sablé, Marco Tognon, Daniele Pucci, Antonio Franchi. "Direct Force ...
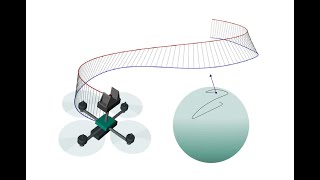
Dynamically Feasible Task Space Planning For Underactuated Aerial Manipulators - Detailed Analysis & Overview
The recorded version of our conference talk at ICRA 2021, where our paper was a Finalist for "Best Paper in Unmanned Status: IEEE International Conference on Robotics and Automation (ICRA) 2020 accepted. Video attached to the paper: Gabriele Nava, Quentin Sablé, Marco Tognon, Daniele Pucci, Antonio Franchi. "Direct Force ... Status: accepted for publication in IEEE International Conference on Robotics and Automation (ICRA) 2023 * Category : Work by: BEATRIZ LOPES DE ALBUQUERQUE Advisors: Pedro Casau, Rui Moreira. Course: Aerospace Engineering Project ... This video is the supplementary material to our paper "Motion
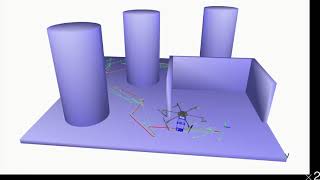
Status: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2021 accepted. * Category: Paper: Tognon M, Cataldi E, Tello Chavez H, Antonelli G, Cortés J, Franchi A. Control-Aware Motion Griffin is a student project from the Autonomous Systems Lab at ETH Zürich. Our mission is to combine a flying platform with a ... This is a video supplement to the book "Modern Robotics: Mechanics,