Media Summary: Junghun Suh, Seungil You, and Songhwai Oh, "A This video shows how Dragonfly, Accuware's proprietary visual SLAM technology, can be used to track and monitor P. Gohl , J. Alonso-Mora, R. Siegwart, P. Beardsley, "Vision-Based
Cooperative Indoor Localization Using Multiple Robots - Detailed Analysis & Overview
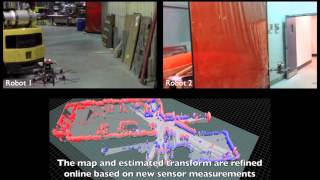
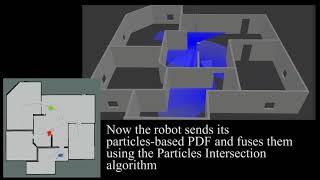
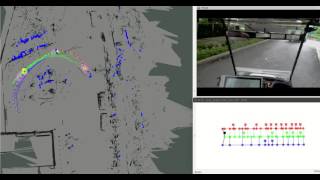
Junghun Suh, Seungil You, and Songhwai Oh, "A This video shows how Dragonfly, Accuware's proprietary visual SLAM technology, can be used to track and monitor P. Gohl , J. Alonso-Mora, R. Siegwart, P. Beardsley, "Vision-Based Multi-vehicle Cooperative Localization Using Pose Graph We handle a scenario in which the goal point is located at (800800). The environmental disturbance direction is plotted We present a consistent and distributed state estimator
This simulation shows the observability property of relative sensing. multi-vehicle cooperative localization using pose graph techniques and v2v communication This video shows the result of research in distributed information fusion and its application in (AAAI2023)Moving Landmark assisted Distributed Learning based Decentralized