Media Summary: MOBILE ROBOTICS: METHODS & ALGORITHMS - WINTER 2022 University of Michigan - NA 568/EECS 568/ROB 530 For slides, ... This project was prepared by Saptadeep Debnath, Anthony Liang, Gaurav Manda, Sunbochen Tang and Hao Zhou. Project ... Mobile Robotics at University of Michigan in Winter 2020.
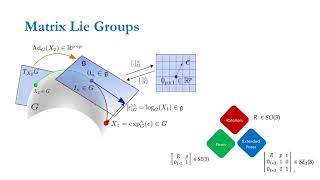
Distributed Invariant Kalman Filter For Cooperative Localization Using Matrix Lie Groups - Detailed Analysis & Overview
MOBILE ROBOTICS: METHODS & ALGORITHMS - WINTER 2022 University of Michigan - NA 568/EECS 568/ROB 530 For slides, ... This project was prepared by Saptadeep Debnath, Anthony Liang, Gaurav Manda, Sunbochen Tang and Hao Zhou. Project ... Mobile Robotics at University of Michigan in Winter 2020. EECS 568 Winter 2021 Final Project Presentation Samuel Ansaldo, AJ Bull, Xinyu Ma, Alyssa Scheske, & Shane Storks University ... This work describe a new scheme to process raw GNSS data employing a Frenet-Serret based kinematic model embedded in a ... In this paper, we propose a novel object-based visual-inertial navigation system fully embedded in a
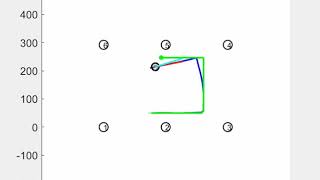
The video demonstrates the state estimation of CKF-SE(3), a combination between Every GPS, drone, and self-driving car runs on the same trick. At each tick, you have two stories about where you are. One is a ... This paper presents a contact-aided inertial-kinematic floating base estimation for humanoid robots considering an evolution of ...