Media Summary: Contact-Implicit Trajectory Optimization using an Analytically Solvable Contact Model Accompanies the paper K. Hauser, Fast Interpolation and Supplemental video for ICRA 2021 paper: Yifan Zhu, Zherong Pan, and Kris Hauser.
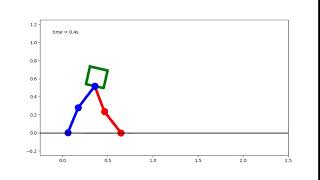
Contact Implicit Result 1 M Run Minimal Time - Detailed Analysis & Overview
Contact-Implicit Trajectory Optimization using an Analytically Solvable Contact Model Accompanies the paper K. Hauser, Fast Interpolation and Supplemental video for ICRA 2021 paper: Yifan Zhu, Zherong Pan, and Kris Hauser. Planning locomotion strategies for legged microrobots is challenging due to their complex morphology, high frequency passive ... Implementation of "A direct method for trajectory optimization of rigid bodies through