Media Summary: Tutorial - Return of the AI Written by Yotam Granov Cognitive Robotics (097244) - Winter 2022/23 Technion - Israel Institute of ... This is a video supplement to the book "Modern Robotics: Mechanics, In this Intro to Robotics lecture, we explore how to make
Computing Multiple Guiding Paths For Sampling Based Motion Planning Icar2019 Rrt Ir Cross - Detailed Analysis & Overview
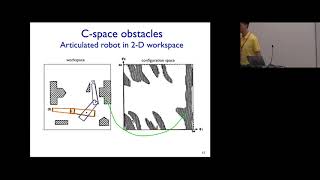
Tutorial - Return of the AI Written by Yotam Granov Cognitive Robotics (097244) - Winter 2022/23 Technion - Israel Institute of ... This is a video supplement to the book "Modern Robotics: Mechanics, In this Intro to Robotics lecture, we explore how to make In this Intro to Robotics lecture, we focus on the practical implementation of the Rapidly-exploring Random Tree ( Speakers: David Hsu, National University of Singapore. Paper: Liam Schramm and Abdeslam Boularias. "Learning-
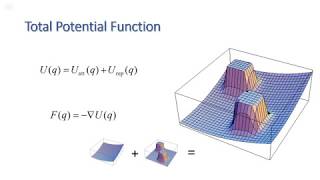
ICAPS 2016 -- Summer School Presentation Title: This video explains artificial potential field method used in Robot Sampling-Based Motion Planning on Manifold Sequences



![Sampling-Based Motion Planning (1/2) | Intro to Robotics [Lecture 33]](https://i.ytimg.com/vi/NECuabO8WEY/mqdefault.jpg)

![[IROS2019] Waypoint-RRT*: Sampling-based Motion Planning for Aerial Pick-and-Place](https://i.ytimg.com/vi/SIQsg_ZK0z8/mqdefault.jpg)
![Sampling-Based Motion Planning (2/2) | Intro to Robotics [Lecture 34]](https://i.ytimg.com/vi/Sq55X22fH94/mqdefault.jpg)




![Motion Planning Algorithms (RRT, RRT*, PRM) - [MIT 6.881 Final Project]](https://i.ytimg.com/vi/gP6MRe_IHFo/mqdefault.jpg)
![[ICRA'13] RRT*-AR: Sampling-Based Alternate Routes Planning](https://i.ytimg.com/vi/n-lVWtzwaCI/mqdefault.jpg)