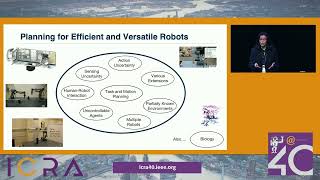
Media Summary: This is a video supplement to the book "Modern Robotics: Mechanics, Okay so here's the idea it's pretty simple I guess but just to remember the In this Intro to Robotics lecture, we explore how to make
Sampling Based Motion Planning - Detailed Analysis & Overview
This is a video supplement to the book "Modern Robotics: Mechanics, Okay so here's the idea it's pretty simple I guess but just to remember the In this Intro to Robotics lecture, we explore how to make Subject: Mechanical Engineering and Science Course: Robot Speakers: David Hsu, National University of Singapore. Computer Science Distinguished Lecture Series presents, “
Overview of RRT, RRT*, PRM Includes visuals created from our own implementations Final Project for MIT 6.881 By Violet Killy, ... In this Intro to Robotics lecture, we focus on the practical implementation of the Rapidly-exploring Random Tree (RRT) algorithm ... See the other videos in this series: This video ... Sampling-Based Motion Planning on Sequenced Manifolds (PSM*) Designing and executing a robot calibration routine is hard. We developed a fully automated Manipulation with sampling based motion planning

![Sampling-based Methods [Lecture, Marija Popović]](https://i.ytimg.com/vi/CrQJAtPn8sY/mqdefault.jpg)

![Sampling-Based Motion Planning (1/2) | Intro to Robotics [Lecture 33]](https://i.ytimg.com/vi/NECuabO8WEY/mqdefault.jpg)





![Motion Planning Algorithms (RRT, RRT*, PRM) - [MIT 6.881 Final Project]](https://i.ytimg.com/vi/gP6MRe_IHFo/mqdefault.jpg)
![Sampling-Based Motion Planning (2/2) | Intro to Robotics [Lecture 34]](https://i.ytimg.com/vi/Sq55X22fH94/mqdefault.jpg)







