Media Summary: AMR path planning and obstacle avoidance with ROS2 Welcome to TechLab ! Welcome to Part 1 of our Drone This video explains the basics of SLAM (Simultaneous Localization and Mapping), how a LIDAR sensor works, frontier exploration ...
Amr Path Planning And Obstacle Avoidance With Ros2 - Detailed Analysis & Overview
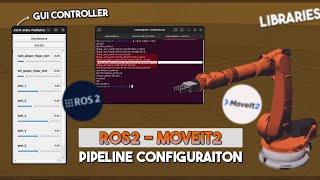
AMR path planning and obstacle avoidance with ROS2 Welcome to TechLab ! Welcome to Part 1 of our Drone This video explains the basics of SLAM (Simultaneous Localization and Mapping), how a LIDAR sensor works, frontier exploration ... Path Planning and Obstacle avoidance using MoveIt and ROS This is a personal robotics project where I designed and built an autonomous Ackermann steering vehicle from scratch—including ... Lets cover important steps for MoveIt2 integeration in
robotics It takes a significant amount of time and energy to create these free video ... Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ... The Robot has to reach its Target Position regardless the Embedded System Class Project. Implement A* Discover how our mobile robot myAGV leverages



![Python & ROS _ Obstacle Avoiding Turtlebot Robot [Code In Description]](https://i.ytimg.com/vi/5L95R6ePKqo/mqdefault.jpg)
![ROS 2 | TurtleBot3 Obstacle Avoidance [Tutorial]](https://i.ytimg.com/vi/OmBesHAbSDU/mqdefault.jpg)