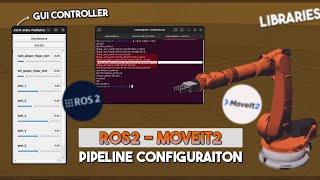
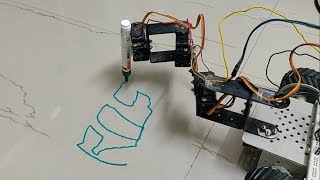
Media Summary: Path Planning and Obstacle avoidance using MoveIt and ROS Lets cover important steps for MoveIt2 integeration in ROS2. Learn how to set up the Kuka arm, add controllers. You can also ... This is a 3-DOF planar manipulator project which
Path Planning And Obstacle Avoidance Using Moveit And Ros - Detailed Analysis & Overview
Path Planning and Obstacle avoidance using MoveIt and ROS Lets cover important steps for MoveIt2 integeration in ROS2. Learn how to set up the Kuka arm, add controllers. You can also ... This is a 3-DOF planar manipulator project which An overview of the capabilities in the latest release of MoveIt2, including The Robot has to reach its Target Position regardless the Check out the full course for beginners! Subscribe to the channel and you get 50% discount for this course ...
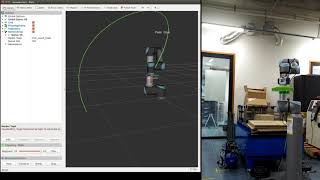
ROS MoveIt! Practice - Planning with Path Constraints MoveIt Path Planning and collision avoidance ROS MoveIt! Practice - Adding/Removing Object In this video we will learn how make a motion In this tutorial, I'll show you how to program a robot arm to plan around