Media Summary: We investigate the effect of tightly-coupled estimation on the performance of Accepted to ICRA 2020 In this paper we investigate the effect of ... In this demo, the blue car is the object to be tracked, but the tracked object can be any types, e.g. pedestrian, vehicles, or other ...
Visual Inertial Tracking Ekf Based For Working Environments - Detailed Analysis & Overview
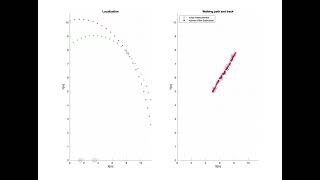
We investigate the effect of tightly-coupled estimation on the performance of Accepted to ICRA 2020 In this paper we investigate the effect of ... In this demo, the blue car is the object to be tracked, but the tracked object can be any types, e.g. pedestrian, vehicles, or other ... A handheld outdoor test using 3 stereo camera pairs (18FPS) Trajectory length: 720m Relative end position error: 0.7% An ... Demonstration of a custom 15-DOF Error-State Kalman Filter (ESKF) fusing a 1000Hz IMU with ~30Hz Fractal ArUco marker ... The video demonstrates the experimental result of
In this demo, the blue car is the object to be tracked. We continuously got both Lidar (red) and Radar (blue) measurements of the ... This paper presents a novel tightly-coupled monocular Solving the bi-lateration problem in radar using ICRA 2018 Spotlight Video Interactive Session Tue AM Pod L.8 Authors: Sandy, Timothy; Buchli, Jonas Title: Object-