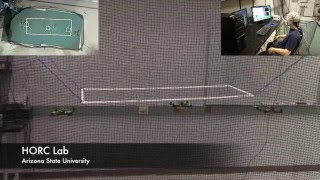
Media Summary: Hello, my name is Nghĩa, and this is the first video demo of my capstone project, which uses PSO algorithms for path planning, ... Geometry features based formation control in swarm robotics MEAM 517 Final Project - Presentation Update.
Swarm Robot Formation Control 1 - Detailed Analysis & Overview
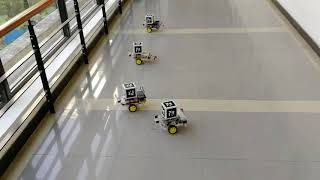
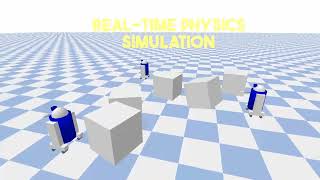
Hello, my name is Nghĩa, and this is the first video demo of my capstone project, which uses PSO algorithms for path planning, ... Geometry features based formation control in swarm robotics MEAM 517 Final Project - Presentation Update. Three autonomous robots demonstrate advanced Link to Project Description: Link to Source Code: ... In this video, we explain a decentralized shape
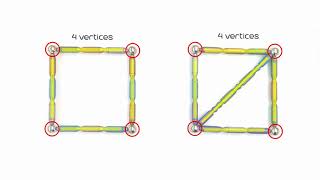
First demo of the distributed consensus and Potential functions are used to construct a