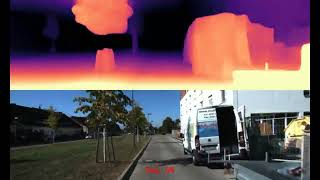
Media Summary: LIMO with KITTI odometry data sequence 01 RAUM-VO: Depth estimation for KITTI Odometry Sequences 00 to 10 YOLOv5 on KITTI Odometry Benchmark Dataset for Semantic Labelling
Slamlab Kitti Odometry Sequence 01 - Detailed Analysis & Overview
LIMO with KITTI odometry data sequence 01 RAUM-VO: Depth estimation for KITTI Odometry Sequences 00 to 10 YOLOv5 on KITTI Odometry Benchmark Dataset for Semantic Labelling