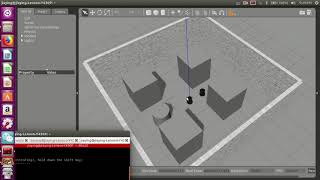
Media Summary: Turtlebot4s maintain a fixed relative position during cycling, deployed by Saimai Lau. Multirobot spawning - GAZEBO + Turtlebot + ROS Using the developed Type-2 fuzzy controller, two
Simple Turtlebot Multi Robot Formation - Detailed Analysis & Overview
Turtlebot4s maintain a fixed relative position during cycling, deployed by Saimai Lau. Multirobot spawning - GAZEBO + Turtlebot + ROS Using the developed Type-2 fuzzy controller, two Behind the scene of the robotic experiments for the "Influence of team interactions on Formation Control Algorithm Application in Turtlebot Simulation ROS Turtlesim simulation of Multi Robot coordination using shadow algorithm
This experiment uses bearing control based