Media Summary: Presented by Lorenzo Riano at SBRS 2014. The Stanford-Berkeley Robotics Symposium brought together roboticists from ... In this episode I'm joined by Lyne Tchapmi, PhD student in the Stanford Computational Vision and Geometry Lab, to discuss her ... Welcome to IJCAI 2021 AI4AD Workshop! Title:
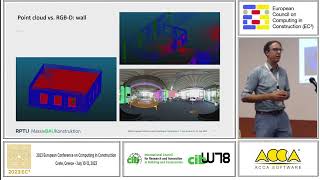
Semantic Point Clouds Interpretation - Detailed Analysis & Overview
Presented by Lorenzo Riano at SBRS 2014. The Stanford-Berkeley Robotics Symposium brought together roboticists from ... In this episode I'm joined by Lyne Tchapmi, PhD student in the Stanford Computational Vision and Geometry Lab, to discuss her ... Welcome to IJCAI 2021 AI4AD Workshop! Title: Fraunhofer Italia uses artificial intelligence as a tool for the improvement and speed up of decision-making processes. One area of ... As LiDAR and other 3D sensing technologies become more ubiquitous, high-quality We just have some sparse collection of points. And so we have to use a different starting point to get a reasonable
Lidar, which stands for “light detection and ranging,” is a pivotal tool in modern robotics and computer vision applications, ... Excited to share our new work and new dataset on LiDAR Get 7x PDF for 3D Data Tutorials here: Pre-order my new book with O'Reilly: ... I share a hands-on Python approach to Automate 3D Shape Detection, Segmentation, Clustering, and Voxelization for Demonstrator video of our mobile mapping system with terrestrial laser scanner and co-calibrated Resonon Pika-L hyper spectral ...

![Annotation rules and classes for semantic segmentation of point clouds for digitalization of [....]](https://i.ytimg.com/vi/LIvs74_5ZBs/mqdefault.jpg)