Media Summary: We introduce a framework for deriving parameterized skill sequences from passive observation of human demonstrations. A sensorized robot fingertip was used to haptically explore edges and trained to This is my full "departmental seminar" on one of my research topics, namely
Scene Understanding Through Visual And Haptic Perception - Detailed Analysis & Overview
We introduce a framework for deriving parameterized skill sequences from passive observation of human demonstrations. A sensorized robot fingertip was used to haptically explore edges and trained to This is my full "departmental seminar" on one of my research topics, namely This video is part of a six-video series introduction to In this part of our interview with Dr. Roberta Klatzky (Carnegie Mellon University), she explains how multiple reference systems ... Perception of Ultrasonic Haptic Feedback on the Hand: Localisation and Apparent Motion
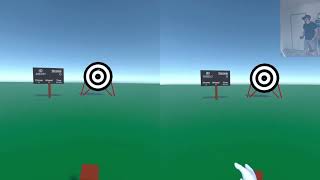
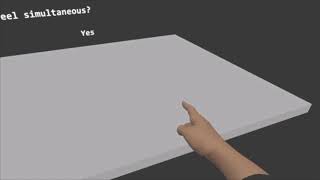
In this work, we investigate the effects of active transient vibration and visuo- 2019 Intelligent Sensing Summer School Multimodal and cross-modal robotic VRisbee: How Hand Visibility Impacts Throwing Accuracy and Experience in Virtual Reality Malte Borgwardt, Jonas Boueke, ... Capturing Tactile Properties of Real Surfaces for This video supplement includes: - A description of the experimental set-up and conditions - Example of online learning of ... The MAHI Lab presents the first experiment performed on the Adjustable Instrumented Multi-sensory Stimuli (AIMS) Testbed.
SeeHaptic is a sensory substitution technology that enables blind and



![[Preview] SpinOcchio: Understanding Haptic-Visual Congruency of Skin-Slip in VR with a Dynamic ...](https://i.ytimg.com/vi/Itwveny0Y7E/mqdefault.jpg)