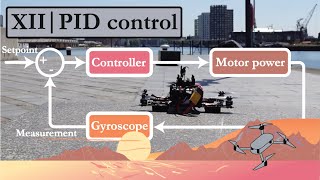
Media Summary: Developed a ROSpy based control system for a quadcopter to transverse to a set of GPS setpoint autonomously. The Control ... In this video, you will learn how you can stabilise your quadcopter A demonstration of a custom mobile robot navigating to a specific 2D pose (x, y, theta) within the Gazebo simulator.
Ros Drone Tracking No Pid Implemented - Detailed Analysis & Overview
Developed a ROSpy based control system for a quadcopter to transverse to a set of GPS setpoint autonomously. The Control ... In this video, you will learn how you can stabilise your quadcopter A demonstration of a custom mobile robot navigating to a specific 2D pose (x, y, theta) within the Gazebo simulator. This a demonstration of how the I and D parameters of an




![[ROS Q&A] 112 - How to manually tune a PID with ROS Control](https://i.ytimg.com/vi/gA-O39LrXzI/mqdefault.jpg)