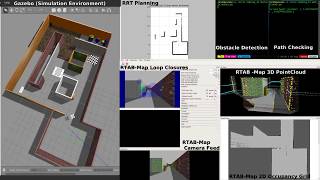
Media Summary: This video briefly explains and demonstrates See the other videos in this series: This video ... Path Planning in unknown environment. As agent receives more information about environment, and detects obstacles in path, ...
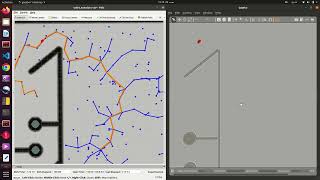
Ros Autonomous Robot Exploration Using Rapidly Randomized Tree Rrt - Detailed Analysis & Overview
This video briefly explains and demonstrates See the other videos in this series: This video ... Path Planning in unknown environment. As agent receives more information about environment, and detects obstacles in path, ... Rapidly-exploring Random Trees (RRT) Motion Planning: ROS This video addresses the problem of real-time planning and control of a group of aerial vehicles flying in an environment VDEngineering ~~My Udemy Courses on Motion Planning / Navigation / Trajectory Planning: ...
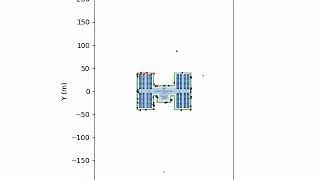
Rapidly-Exploring Random Tree (RRT) Algorithm for Mobile Robot