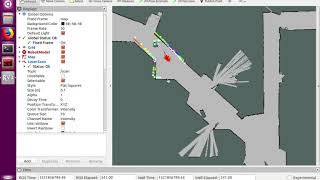
Media Summary: Welcome to TechLab ! In this video, we dive deeper into The YouBot is equipped with 2D lidar scanners - now both are used. The map was build using gmapping in advance. * The red ... Monte Carlo Localization: Corridor Test (RACECAR)
Robot Teleoperation Framework Testing Monte Carlo Localisation - Detailed Analysis & Overview
Welcome to TechLab ! In this video, we dive deeper into The YouBot is equipped with 2D lidar scanners - now both are used. The map was build using gmapping in advance. * The red ... Monte Carlo Localization: Corridor Test (RACECAR) Autonomous Robot with Adaptive Monte Carlo Localization Navigation System FYP VIDEO ALIFF FARHAN implement MCL - input: lidar 2d data, odometry data, self-created occupancy grid. Detailed description and source code can be found here:
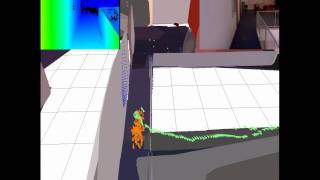
Autonomous Robot with Adaptive Monte Carlo Localization Algorithm Navigation System FYP Presentation Demonstrated using a Kinect RGB-D sensor (only) Playback is about 2x real time motion.
















![Robot Soccer Self-Localization using Monte Carlo Localization (MCL) [2/3]](https://i.ytimg.com/vi/tMeLSQvUeVQ/mqdefault.jpg)
