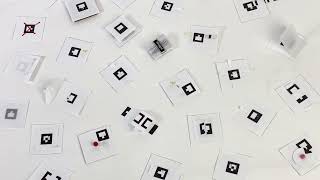
Media Summary: Only one Apriltag is available in the environment and a coupled camera-cluster measurement model is employed. This work has been accepted by the 2021 IEEE International Conference on Multisensor Fusion and Integration. LARS: Improving the Mobile Robots Indoor Localization System by Combining SLAM with Fiducial Markers
Robot Localization From Fiducials Test - Detailed Analysis & Overview
Only one Apriltag is available in the environment and a coupled camera-cluster measurement model is employed. This work has been accepted by the 2021 IEEE International Conference on Multisensor Fusion and Integration. LARS: Improving the Mobile Robots Indoor Localization System by Combining SLAM with Fiducial Markers In this tutorial, I'll guide you through setting up sensor fusion for In this work we present the design of thermal To run precise trajectories, this is probably the easiest way to setup the camera-based (X, Y)
On 27/10/2022, CAREM Office, Universiti Teknologi Petronas Machine: Ubuntu 20.04, ROS Noetic, Intel Core i3, 7.6Gb memory, ... Navigation using only one marker, which contains four artificial features, is a challenging task since camera pose estimation using ... Welcome to TechLab !In this video, we break down Welcome to TechLab ! In this video, we dive deeper into On 07/10/2022, CAREM Office, Universiti Teknologi Petronas Machine: Ubuntu 20.04, ROS Noetic, Intel Core i3, 3.7Gb memory, ...