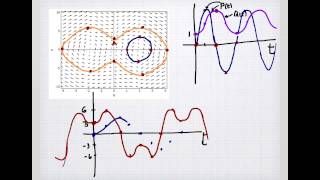
Media Summary: Problem 2: Vector-field based Trajectory Tracking Authors: Abin Alex Pothen & Ashwini Ratnoo Affiliation: Dept. of Aerospace Engineering, Indian Institute of Science - Bangalore. To navigate and control a single mobile robot or a robotic swarm with a higher efficiency, a novel non-potential orthogonal
Problem 2 Vector Field Based Trajectory Tracking - Detailed Analysis & Overview
Problem 2: Vector-field based Trajectory Tracking Authors: Abin Alex Pothen & Ashwini Ratnoo Affiliation: Dept. of Aerospace Engineering, Indian Institute of Science - Bangalore. To navigate and control a single mobile robot or a robotic swarm with a higher efficiency, a novel non-potential orthogonal This is the supplementary video of our recent paper accepted by 2020 IEEE Conference on Decision and Control (CDC). 2019 IEEE Conference on Decision and Control (CDC) supplementary material of the paper titled "Integrated Path A pair of vectored thrusts brings versatility and power efficiency to bi-copter unmanned aerial vehicles (UAVs). One common ...
This is a video solution to a participation activity for my mathematical models in biology course. H. Quynh Dinh, Liefei Xu, Zhongzang Lin, Eugene Zhang, and Robert S. Laramee, A Distribution- Let's take a look at this example involving two Yes so we have shown again that this point is globally asymptotically stable which was expected because Paper: ProVANT Simulator: A Virtual Unmanned Aerial Vehicle Platform For Control System Development. This 6-minute video describes the main contribution of our work on the
This is the supplementary video for the paper entitled "Singularity-free guiding