Media Summary: This video shows the implementation of an In this video, we show the capabilities of the Demonstration of a stabilization controller with
Pop Tutorial How To Solve Explicit Multi Parametric Mpc Problems - Detailed Analysis & Overview
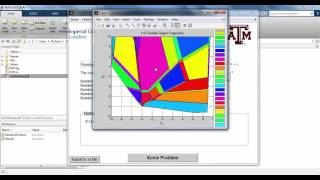
This video shows the implementation of an In this video, we show the capabilities of the Demonstration of a stabilization controller with In this video, the geometrical algorithm used for the This video highlights the solvers available in the Here an NMPC has been designed to avoid a dynamic obstacle. CasADi is the best tool for this simulation. I will go through the ...
Paper available at ( This is a project of In this video, we design and compare two approaches for implementing Nonlinear Model Predictive Control ( In fact, it is a model-based optimization This video and thorough an example, explains the step for formulation an