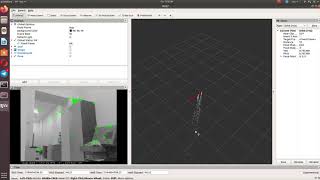
Media Summary: Recorded as part of final year project for Mechanical Engineering (MEng) at Imperial College London - Recorded on 10/6/19. Video showing robot recording its own trajectory during a simple forward and back movement. Monocular In this video, I demonstrate how to perform Visual SLAM using a Raspberry Pi 5 with ROS2 Humble,
Orb Slam2 On Picamera Sequence - Detailed Analysis & Overview
Recorded as part of final year project for Mechanical Engineering (MEng) at Imperial College London - Recorded on 10/6/19. Video showing robot recording its own trajectory during a simple forward and back movement. Monocular In this video, I demonstrate how to perform Visual SLAM using a Raspberry Pi 5 with ROS2 Humble, ORB SLAM2 using banana pi & remotely placed webcamera under ROS on nexus 10022 Used a USB webcam and a Raspberry Pi 4 running Ubuntu Mate 20.04 and ROS Noetic to implement the ORB-SLAM2 Benchmarking on KITTI using Monocular Camera Feed
In this video we look at everything to do with cameras and images in ROS! Companion blog post available at ... Code & Info: Authors: Raúl Mur-Artal, J. M . M. Montiel and Juan D. Tardós University of ... The map was created using RGBD (+depth), yet relocalization works reasonably well with only RGB. See the map created in the ... ORB SLAM 2 with Calibrated Monocular Camera