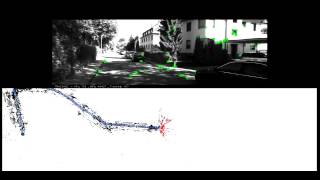
Media Summary: Code & Info: Authors: Raúl Mur-Artal, J. M . M. Montiel and Juan D. Tardós University of ... Visit the project webpage: Source Code available: ... Monocular ORB-SLAM failure case on Kitti dataset sequence01
Orb Slam2 In Kitti 01 - Detailed Analysis & Overview
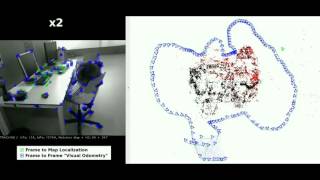
Code & Info: Authors: Raúl Mur-Artal, J. M . M. Montiel and Juan D. Tardós University of ... Visit the project webpage: Source Code available: ... Monocular ORB-SLAM failure case on Kitti dataset sequence01 secuencia 07 cierre de bucles relocalización. Orange features are features with depth information. We build a map with sequence V1_02_medium. We then disable mapping (Localization mode) and use the map to localize the ...
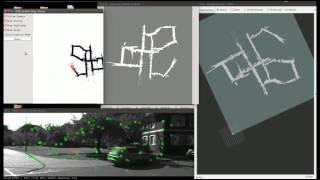
speed x2 E-mail : rodrigosarmentoxx.com GitHub: This project ... ORB-SLAM2 Benchmarking on KITTI using Monocular Camera Feed By using ORBSLAM and only monocular camera we were able to create a 2d occupancy grid map to eliminate the use of lidar to ... Title : OV 2 SLAM : A Fully Online and Versatile Visual SLAM for Real-Time Applications Authors : Maxime Ferrera , Alexandre ... ORG_SLAM2 on nvidia TX1 audvidea J120 and Enroute enclosure and SOC modules. ROS Kinetic Ubuntu 16.04 ARM64.