Media Summary: E-mail : rodrigosarmentoxx.com GitHub: This project Paper ... ORB-Slam2 using RGB-D (depth kinect v1 + turtlebot's willow urdf model) Georgia Tech CS6476: SLaM w/ Microsoft Kinect
Orb Slam 2 Rgbd Using Microsoft Kinect - Detailed Analysis & Overview
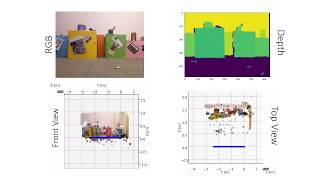
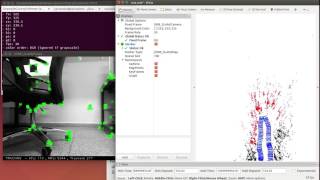
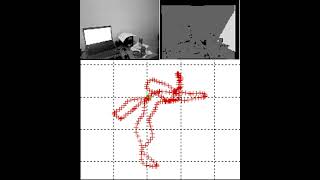
E-mail : rodrigosarmentoxx.com GitHub: This project Paper ... ORB-Slam2 using RGB-D (depth kinect v1 + turtlebot's willow urdf model) Georgia Tech CS6476: SLaM w/ Microsoft Kinect Online Simultaneous Localization and Mapping SLAM system for indoor environments by using a Kinect camera




![RGBD-SLAM with ROS and Microsoft Kinect [APO v1.0 Robot] Raspberry Pi](https://i.ytimg.com/vi/XDyhDrTW_5g/mqdefault.jpg)