Media Summary: Moving obstacle information is not being updated in the Ubuntu Version : 22.04 ROS2 Version : HUMBLE This Wish to get into shoes of Robotics Software Engineer and see the complete cycle of mobile robot development. Also learn and ...
Occupancy Grid Mapping Using Ros - Detailed Analysis & Overview
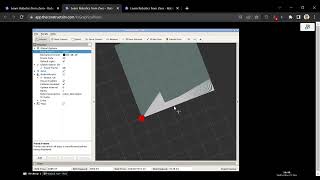
Moving obstacle information is not being updated in the Ubuntu Version : 22.04 ROS2 Version : HUMBLE This Wish to get into shoes of Robotics Software Engineer and see the complete cycle of mobile robot development. Also learn and ... ENLACE interns Yoatzin and Ziyun implemented Used RViz for visualization. Wonder how it would work without log odds? A quadrotor UAV explores an uncertain environment. Asus Xtion and Hokuyo LIDAR depth sensors are fixed onboard to capture ...
Read more on the Breshenham's line algorithm here: This is a simulation demonstration of building an Modeling and understanding the environment is an essential task for autonomous driving. In addition to the detection of objects, ... Another little step to the fully understanding of the 3D Occupancy Grid Using Kinect and ROS-Rviz
















![[Research] Occupancy Grid Mapping](https://i.ytimg.com/vi/B8qtcdncl50/mqdefault.jpg)

