Media Summary: Obstacle avoidance and Path Planning on Turtlebot3 with Bug Algorithm with ROS and Gazebo Path Planning on Turtlebot3 with Bug Algorithm with ROS and Gazebo This video demonstrates a small example of
Obstacle Avoidance And Path Planning On Turtlebot3 With Bug Algorithm With Ros And Gazebo - Detailed Analysis & Overview
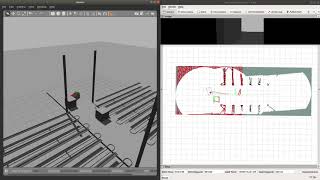
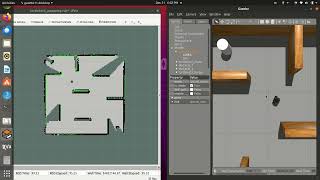
Obstacle avoidance and Path Planning on Turtlebot3 with Bug Algorithm with ROS and Gazebo Path Planning on Turtlebot3 with Bug Algorithm with ROS and Gazebo This video demonstrates a small example of Multi Sensor (2 LiDAR + RealSense D435) * Optimization 1. Drive straight in a straight line (In the absence of In this project, I have implemented the A* Obstacle avoidance with ROS navigation stack.
This is the final output of my attempt to simulate Virtual Force Field


![ROS 2 | TurtleBot3 Obstacle Avoidance [Tutorial]](https://i.ytimg.com/vi/OmBesHAbSDU/mqdefault.jpg)


![Python & ROS _ Obstacle Avoiding Turtlebot Robot [Code In Description]](https://i.ytimg.com/vi/5L95R6ePKqo/mqdefault.jpg)