Media Summary: Still looking for the perfect Christmas present? :) Why not try out Brilliant this year? =D Elliptic ... Video accompanying the paper: Differential Interpolating from a policy computed offline, this
Nonlinear Pendulum Control Using Dynamic Programming And Constrained Control - Detailed Analysis & Overview
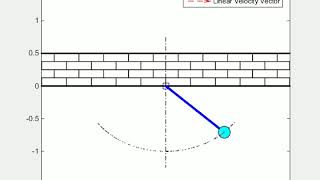
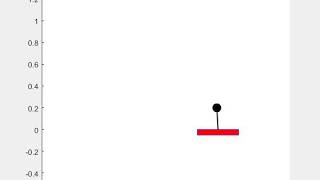
Still looking for the perfect Christmas present? :) Why not try out Brilliant this year? =D Elliptic ... Video accompanying the paper: Differential Interpolating from a policy computed offline, this This video explains how to determine the equations of the trajectories for the pendular equation, which is a conservative ... This lecture presents the mathematical modeling of a Code for this demo is now available at: A description and ...


![Exact Solution of the Nonlinear Pendulum [No Approximations, engis gtfo]](https://i.ytimg.com/vi/efvT2iUSjaA/mqdefault.jpg)