Media Summary: Here an NMPC has been designed to avoid a dynamic obstacle. Upcoming hands-on workshop is November 18-20, see Voice-over of EUCCO2016 presentation about
Nonlinear Mpc Tutorial With Casadi 3 5 - Detailed Analysis & Overview
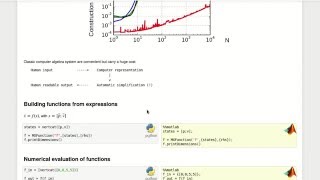
Here an NMPC has been designed to avoid a dynamic obstacle. Upcoming hands-on workshop is November 18-20, see Voice-over of EUCCO2016 presentation about The video demonstrates a Python program using the This lecture series contains a brief introduction to the Adriaen Verheyleweghen and Christoph Backi Virtual Simulation Lab seminar series
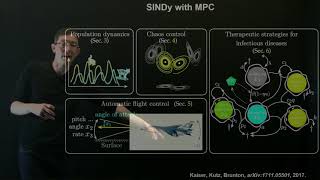
Nonlinear Model Predictive Control with CGMRES This lecture shows how to use sparse identification of Work published in ICAR 2019 Abstract: Some recent contributions have emerged designing