Media Summary: This is a new map exploration strategy for directing A miniature SCAT scene is customized, in which 10 quad-rotor aerial International Conference on Digital Technologies for Sustainable Crop Production (DIGICROP 2022) March 28-30, 2022 ...
Multi Robot Forest Coverage Simulation - Detailed Analysis & Overview
This is a new map exploration strategy for directing A miniature SCAT scene is customized, in which 10 quad-rotor aerial International Conference on Digital Technologies for Sustainable Crop Production (DIGICROP 2022) March 28-30, 2022 ... An application of the framework proposed in the paper: Lin, Kim, Egerstedt - "Heterogeneous Collaborative Pursuit via Heriot-Watt University School of Mathematical and Computer Sciences Master in The intention of this video is to show a first simplified path planning functionality of the OptiVisor system for simple field shapes.
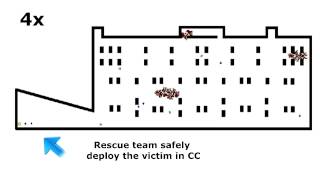
Abstract - Efficient exploration strategies are vital in tasks such as search-and-rescue missions and disaster surveying. Unmanned ...