Media Summary: Four-way Angular Pouch Actuator for Grasper. This was the third iteration due to changes made with thermoplastic elastomer ... 1. Granular Jamming Grasper 2. Laminar Jamming Structure. ME 568 Lab 5 - Linear Pouch Actuator Crane
Me568 Soft Robotics Laboratory 5 - Detailed Analysis & Overview
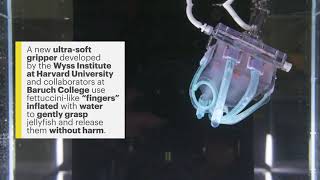
Four-way Angular Pouch Actuator for Grasper. This was the third iteration due to changes made with thermoplastic elastomer ... 1. Granular Jamming Grasper 2. Laminar Jamming Structure. ME 568 Lab 5 - Linear Pouch Actuator Crane In order to study jellyfish and other fragile marine life without damaging them, researchers at the Wyss Institute and Baruch ...