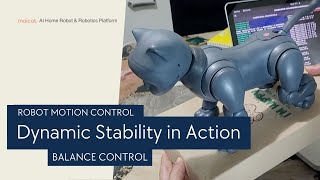
Media Summary: Macroact's R&D lab focuses to enhance the interaction between Xinke Deng, Yu Xiang, Arsalan Mousavian, Clemens Eppner, Timothy Bretl and Dieter Fox Link to the paper: ... Master of Balance for Dynamic Environments! Four-legged home
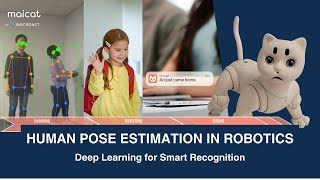
Maicat And Human Pose Estimation In Robotics - Detailed Analysis & Overview
Macroact's R&D lab focuses to enhance the interaction between Xinke Deng, Yu Xiang, Arsalan Mousavian, Clemens Eppner, Timothy Bretl and Dieter Fox Link to the paper: ... Master of Balance for Dynamic Environments! Four-legged home ... Description: Recent transformer-based approaches have demonstrated excellent performance in 3D We train and deploy FlyPose, a lightweight top-down Paper: Presented at Siggraph Asia '18, Tokyo, Japan We propose a ...
Simon Bultmann, Raphael Memmesheimer, and Sven Behnke: External Camera-based Mobile MERL Researcher Siddarth Jain and MERL intern Baichuan Huang presented their paper titled "EARL: Eye-on-Hand ...










![[ICRA 2023] External Camera-based Mobile Robot Pose Estimation for Collaborative Perception ...](https://i.ytimg.com/vi/e2LpcZDWaZc/mqdefault.jpg)


![[IROS 2023] EARL: Eye-on-Hand Reinforcement Learner for Dynamic Grasping with Active Pose Estimation](https://i.ytimg.com/vi/81jbwcbhOVs/mqdefault.jpg)
