Media Summary: Introduction to the Simultaneous Localization and Mapping Problem ( This video provides some intuition around Pose Graph Optimization—a popular framework for solving the simultaneous ... Thanks to Jane Street for their support... Check out internships here: More links & stuff in full ...
Line Based Slam - Detailed Analysis & Overview
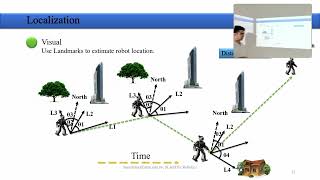
Introduction to the Simultaneous Localization and Mapping Problem ( This video provides some intuition around Pose Graph Optimization—a popular framework for solving the simultaneous ... Thanks to Jane Street for their support... Check out internships here: More links & stuff in full ... We cover: What SLAM really is Why SLAM is challenging Graph- In this Chapter: - What is the robot - What is the Autonomous Mobile Robot - What is the robot Mapping - Localization concept ... This video contains two real scenario experiments conducted with our self-developed robot and is played at 6X speed.
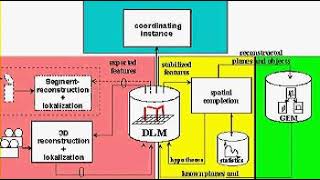
This video represents the feature extraction results of the work " Building a 3-D Line-based Map using Stereo SLAM Talk for the RSS 2020 paper: X. Chen, T. Läbe, A. Milioto, T. Röhling, O. Vysotska, A. Haag, J. Behley, and C. Stachniss, ...