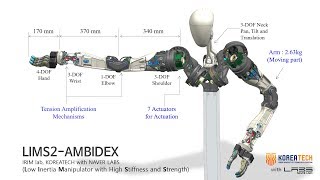
Media Summary: Low Inertia Manipulator with High Stiffness and Strength. Degrees of Freedom 7 DOF / Arm : Shoulder 3, elbow 1, wrist 3 3 DOF ... LIMS (Low Intertia Manipulator with High Stiffness and Strength) Vibration caused by inappropriate motor driver gains & low torsional stiffness of the elbow joint. - Driver gain tunning required ...
Lims2 Ambidex Basic Motion Test - Detailed Analysis & Overview
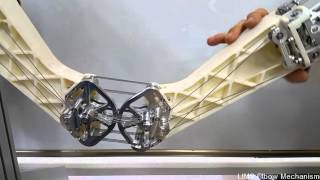
Low Inertia Manipulator with High Stiffness and Strength. Degrees of Freedom 7 DOF / Arm : Shoulder 3, elbow 1, wrist 3 3 DOF ... LIMS (Low Intertia Manipulator with High Stiffness and Strength) Vibration caused by inappropriate motor driver gains & low torsional stiffness of the elbow joint. - Driver gain tunning required ... 1-DOF elbow joint - Torque and stiffness are amplified by 6 and 36 times due to a light-weight tension amplification mechanism. LIMS Elbow Mechansim : 1-DOF Joint with a tension amplification mechanism. Cable driven robotic joint inspired by the
4-DOF 3-finger hand - Underactuated finger mechanism - Loosely coupled Joints for constant free Complete gravity compensation using compressive springs and parallel link mechanisms - Nonsingular translational