Media Summary: ML/RL methods are often viewed as a magical black box, and while that's not true, learned policies are nonetheless a valuable ... Jie Tan, Google DeepMind Slides and Summary: ... In this video I explain some basic theory regarding quadruped (four-legged)
Learning Robot Locomotion - Detailed Analysis & Overview
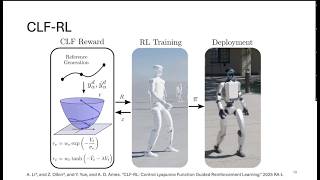
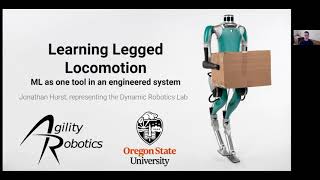
ML/RL methods are often viewed as a magical black box, and while that's not true, learned policies are nonetheless a valuable ... Jie Tan, Google DeepMind Slides and Summary: ... In this video I explain some basic theory regarding quadruped (four-legged) This work developed a kernel-based residual This video presents a demo of my early-stage research on humanoid ... so I'm going to be talking about controlg guided RL for humanoid











![[ICRA] A Learning Framework for Diverse Legged Robot Locomotion Using Barrier-Based Style Rewards](https://i.ytimg.com/vi/JV2_HfTlOKI/mqdefault.jpg)