Media Summary: Experiment demonstrations of the proposed latent methods based on Assembly and disassembly tasks often involve multiple sub-tasks coexisting within a single observation frame, making it ... LeRobot Research Presentation Presented by Cheng Chi in April 2024 This week:
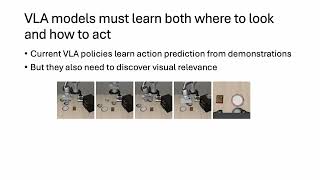
Language Guided Object Centric Diffusion Policy For Collision Aware Robotic Manipulation - Detailed Analysis & Overview
Experiment demonstrations of the proposed latent methods based on Assembly and disassembly tasks often involve multiple sub-tasks coexisting within a single observation frame, making it ... LeRobot Research Presentation Presented by Cheng Chi in April 2024 This week: Princeton University - Nov 3, 2023 Speaker: Russ Tedrake (MIT) Talk title: Dexterous This is the first session with Roger leading a discussion about Gerardo describes his work on the CLoPeMa FP7 European project which aimed to advance start-of-the-art in autonomous ...
What if you could redesign the environment and the The increasing use of batteries in electric vehicles and consumer products highlights the need for efficient recycling solutions. October 14, 2022 Jiajun Wu of Stanford University In the past two years, neural representations for A brief video describing our paper which was accepted to the CVPR Workshop- GRAIL-V 2026. This paper takes a pioneering step towards dynamic one-shot soft tool use for












![[research] Diffusion Policy: Visuomotor Policy Learning via Action Diffusion](https://i.ytimg.com/vi/CtJDROYBmSs/mqdefault.jpg)