Media Summary: Authors: Alejandro Fontán, Javier Civera, Rudolph Triebel Description: This paper presents an Results for the paper: Alejandro Fontán, Javier Civera, Rudolph Triebel RGB-D Inertial Odometry for a Resource-RestrictedRobot in Dynamic Environments presentation
Information Driven Direct Rgb D Odometry - Detailed Analysis & Overview
Authors: Alejandro Fontán, Javier Civera, Rudolph Triebel Description: This paper presents an Results for the paper: Alejandro Fontán, Javier Civera, Rudolph Triebel RGB-D Inertial Odometry for a Resource-RestrictedRobot in Dynamic Environments presentation Pedro F. Proença, Yang Gao, Probabilistic Video attachment of the following paper: Yan Lu and Dezhen Song, Robust ccny_rgbd is collection of tools for real-time visual
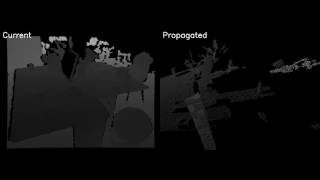
This video demonstrates our robust visual This work reports on a novel formulation and evaluation of visual The comparison between the current frames and the propagated frames for the first 500 frames of the dataset ... Running our algorithm on the freiburg2/desk sequence of the Simple demonstration: CUDA implementation of Colored Point Cloud Registration Revisited. The video is about my project of point cloud map construction based on
RGB-D odometry Updated Encoder-Based Motion Control for an Autonomous Power Wheelchair Authors: Ji Hou, Angela Dai, Matthias Nießner Description: During 3D reconstruction, it is often the case that people cannot scan ...