Media Summary: This video explains the basics of SLAM (Simultaneous Localization and Tando platform demonstrates novel methods for In this project, I demonstrate a ROS 2–based TurtleBot simulation where the
Indoor Mapping Autonomous Navigation Unexpected Obstacle Avoidance - Detailed Analysis & Overview
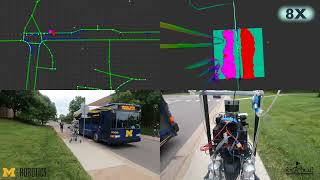
This video explains the basics of SLAM (Simultaneous Localization and Tando platform demonstrates novel methods for In this project, I demonstrate a ROS 2–based TurtleBot simulation where the Autonomous Navigation Of A Known Map On Turtlebot (Obstacle Avoidance) Replanning of the path (green) from the UGV (does not drive due to simplicity) to the Please see below for why this work is being performed on Cassie. Cassie Blue walks
This is the first of the two runs of Husky. In the video, you can see Husky Autonomous navigation with obstacle avoidance (February 2021) ONLY 1 DAY LEFT! SUPPORT INSIGHT 9 ON KICKSTARTER NOW:* ... Final degree project. Part 4: Using the ROS