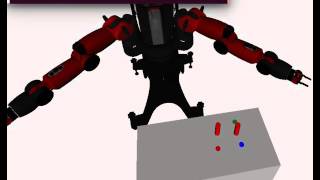
Media Summary: Stepping Over an Obstacle (shown by the red rectangular) Stepping On the Object (shown by the red rectangular) This is a video supplement to the book "Modern Robotics: Mechanics,
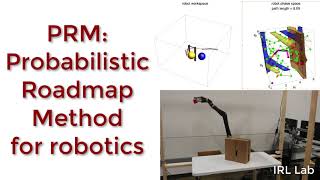
Foot Placement Planner Using Probabilistic Roadmap Method Prm - Detailed Analysis & Overview
Stepping Over an Obstacle (shown by the red rectangular) Stepping On the Object (shown by the red rectangular) This is a video supplement to the book "Modern Robotics: Mechanics, A course project in UM ROB550. A downward-looking camera detects objects on the table (assuming static environment), and the ... Demonstração do funcionamento do algoritmo This is the extra credit vedio for ECE 470 course, this vedio is edited and recorded by Yuqing Zhang. The topic is the
In this project, I will be writing a program to help guide the six link robot from one configuration to another while avoiding the ... Baxter multi objects planning (Probabilistic Roadmap) Probabilistic Roadmap Method (PRM) Implementation to Avoid Obstacle During this phase, the robot is remotely controlled to capture information about the target outdoor environment. The robot ... See the other videos in this series: This video ... Demonstration of an A* Probabilistic Roadmap for Path Planning



![Motion Planning Algorithms (RRT, RRT*, PRM) - [MIT 6.881 Final Project]](https://i.ytimg.com/vi/gP6MRe_IHFo/mqdefault.jpg)