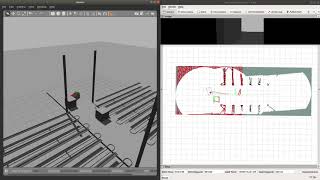
Media Summary: Project by: R.Sharath chandra K V Anil Ramchandra Reddy. Obstacle Avoidance using Lidar with Dynamic Obstacle on Gazebo Simulation Drone follow GPS waypoints using Fast-Planner.
Fibo Simulation In Gazebo Obstacle Avoidance - Detailed Analysis & Overview
Project by: R.Sharath chandra K V Anil Ramchandra Reddy. Obstacle Avoidance using Lidar with Dynamic Obstacle on Gazebo Simulation Drone follow GPS waypoints using Fast-Planner. Event-Triggered Formation Control with Obstacle Avoidance in Gazebo-ROS Simulation Implementing Obstacle Avoidance Simulation in ROS Using Python and CPP in the GAZEBO Environment M Obstacle Avoidance in Drone using Lidar in Gazebo-ROS
Code and usage info about this project can be found on Github Repo ... A successful test run on the turtle bot performed by our professor. Gazebo robot simulation with dynamic obstacle Multi Sensor (2 LiDAR + RealSense D435) * Optimization 1. Drive straight in a straight line (In the absence of Simulation 1: Gazebo Rviz obstacle avoidance quadrotor