Media Summary: Implementation of the extend variant of the Lecture 24 of Intro to Robotics @ University of Houston. See the other videos in this series: This video ...
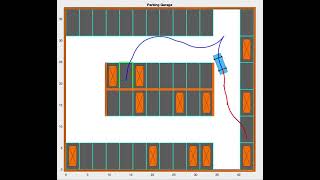
Experiments On Car S Automatic Parking Using Rrt Algorithm And Rs Path Connections - Detailed Analysis & Overview
Implementation of the extend variant of the Lecture 24 of Intro to Robotics @ University of Houston. See the other videos in this series: This video ... Reinforcement learning setting is used to optimize the MRSD 2013-14 Team A: Qua++ro We are a team of 5 graduate students at Carnegie Mellon University. For more information ... HW 2 Given Start and Goal Configurations.










![Motion Planning Algorithms (RRT, RRT*, PRM) - [MIT 6.881 Final Project]](https://i.ytimg.com/vi/gP6MRe_IHFo/mqdefault.jpg)