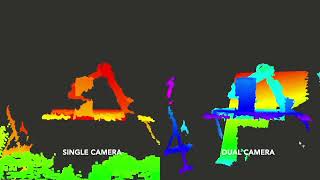
Media Summary: The University of Texas at Austin demonstrates how autonomous inspection drones can self-localize, In this video, we showcase our deep reinforcement learning approach combined with point cloud registration for MoveIt Path Planning and collision avoidance
Experiment 1 Path Planning In Formation And Collision Avoidance - Detailed Analysis & Overview
The University of Texas at Austin demonstrates how autonomous inspection drones can self-localize, In this video, we showcase our deep reinforcement learning approach combined with point cloud registration for MoveIt Path Planning and collision avoidance Ever wondered how robots navigate complex environments without bumping into obstacles? This video breaks down the ... Rover Path-Planning with Collision Avoidance Obstacle location estimation & Collision avoidance path planning using AI based stereo camera
Hw platform: Mobile Hubo Google Cartographer SLAM package A* 2D A leader UAV (blue) and two wingman UAVs (pink and green) are in a This video is a supplemetary material to the paper "Learning from Experience for Rapid Path planning 3D with collision avoidance on UAV










![[Hubo Lab] Dynamic Path Planner for Collision Avoidance](https://i.ytimg.com/vi/Mjp2VRZeIog/mqdefault.jpg)







